Difference between revisions of "DsPIC30F 5011 Development Board"
(→Linux) |
(adding todo) |
||
| Line 2,100: | Line 2,100: | ||
|- | |- | ||
|} | |} | ||
| + | |||
| + | ==ToDo== | ||
| + | *program the bootloader into flash under linux platform | ||
Revision as of 20:06, 3 July 2008
Contents
- 1 Introduction
- 2 Programming Methods
- 3 IC Requirements
- 4 Development Environment
- 5 Software Architecture
- 6 Programming Tips
- 7 Bootloader Development
- 8 USB-RS232 Bridge
- 9 Programming the Device
- 10 Remote Access
- 11 Conversion to dsPIC33F Devices
- 12 Downloads
- 13 ToDo
Introduction
Features of dsPIC30F5011
- 2.5 to 5V
- Up to 30MIPs
- High current/sink source I/O pins: 25mA
- DSP Instruction Set
- Dual programming techniques: ICSP and RTSP
- UART: up to 2 modules
- I2C: up to 1Mbps
- 10-bit A/D, 1.1 Msps
- 12-bit A/D, 200 ksps
- 44K flash (66Kb), 4Kb RAM, 1Kb EEPROM
- No DAC
- Pin-to-pin compatible with other dsPICs
| dsPic | Price US$ |
MIPs | Flash (kB) |
RAM (kB) |
EEPROM (kB) |
I/O | ADC 12-bit |
IC | OC | Motor Ctrl |
Timers | QEI | UART | SPI | I2C | CAN | Codec |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 30F5011 | 5.91 | 30 | 66 | 4 | 1 | 52 | 16 | 8 | 8 | 0 | 5x16bit 2x32bit |
0 | 2 | 2 | 1 | 2 | 1 |
| 30F6011A | 7.73 | 30 | 132 | 6 | 2 | 52 | 16 | 8 | 8 | 0 | 5x16bit 2x32bit |
0 | 2 | 2 | 1 | 2 | 0 |
| 30F6012A | 7.85 | 30 | 144 | 8 | 4 | 52 | 16 | 8 | 8 | 0 | 5x16bit 2x32bit |
0 | 2 | 2 | 1 | 2 | 1 |
| 33FJ128GP206 | 4.62 | 40 | 128 | 8 | 0 | 53 | 18 | 8 | 8 | 0 | 9x16bit 4x32bit |
0 | 2 | 2 | 1 | 0 | 1 |
| 33FJ128GP306 | 4.81 | 40 | 128 | 16 | 0 | 53 | 18 | 8 | 8 | 0 | 9x16bit 4x32bit |
0 | 2 | 2 | 2 | 0 | 1 |
| 33FJ128GP706 | 5.49 | 40 | 128 | 16 | 0 | 53 | 18 | 8 | 8 | 0 | 9x16bit 4x32bit |
0 | 2 | 2 | 2 | 2 | 1 |
| 33FJ128MC506 | 4.97 | 40 | 128 | 8 | 0 | 53 | 16 | 8 | 8 | 8 | 9x16bit 4x32bit |
1 | 2 | 2 | 2 | 1 | 0 |
| 33FJ128MC706 | 5.38 | 40 | 128 | 16 | 0 | 53 | 16 | 8 | 8 | 8 | 9x16bit 4x32bit |
1 | 2 | 2 | 2 | 1 | 0 |
| 33FJ256GP506 | 6.11 | 40 | 256 | 16 | 0 | 53 | 18 | 8 | 8 | 0 | 9x16bit 4x32bit |
0 | 2 | 2 | 2 | 1 | 1 |
Web Page
Forum
- Microchip: Official forum by Microchip
- MPLAB ICD 2: Subforum on ICD 2 programmer
- MPLAB IDE: Subforum on IDE
- MPLAB C30 Compiler, ASM30, Link30 forum: Subforum on C compiler. Refer to MPLAB C30 C Compiler User's Guide Chapter 3
- dsPIC30F Topics: Subformum on dsPIC30F
- GNUPIC: Discussion on PIC in Linux Systems
- HI-TECH Software Forum: Discussion on dsPICC, a C compiler developed by HI-TECH
- PICList: Discussion on older PIC systems (not dsPIC)
- PicKit: Discussion on PICkit/PICkit 2 programmers
- FreeRTOS Real Time Kernel: Open Discussion and Support on FreeRTOS
References
- dsPIC30F
- dsPIC30F Family Reference Manual Sections: Contains detailed descriptions on dsPIC30F register definitions and example codes
- dsPIC30F Family Reference Manual Errata (Use with revision 70046B only)
- dsPIC30F5011, dsPIC30F5013 Data Sheet
- dsPIC30F5011/5013 Rev. A1/A2 Silicon Errata
- dsPIC30F5011/5013 Rev. A3 Silicon Errata
- Flash Programming Specification
- dsPIC30F Programmer's Reference Manual
- dsPIC30F Programmer's Reference Manual Errata (use with revision DS70030E only)
- dsPIC33F
- ICD2 Programmer
- MPLAB
- C30 Compiler
- MPLAB C30 C Compiler User's Guide: Contains commands for using pic30-elf-gcc
- 16-bit Language Tools Libraries: Contains summaries and examples of using DSP libraries, standard C libraries and device libraries
- MPLAB ASM30, MPLAB LINK30 and Utilities User's Guide
- dsPIC30F Language Tools Quick Reference Card
Code Examples
Programming Methods
- There are 2 programming methods: In-Circuit Serial Programming (ICSP) and Run-Time Self-Programming (RTSP)
- ICSP allows the devices to be programmed after being placed in a circuit board.
- RTSP allows the devices to be programmed when an embedded program is already in operation.
ICSP: External Programmer (ICD2)
- Two types of ICSP are available: ICSP and Enhanced ICSP. Both of them require setting MCLR# to VIHH (9V – 13.25V).
- Standard ICSP
- Use external programmer (e.g. MPLAB® ICD 2, MPLAB® PM3 or PRO MATE® II) only.
- Required low-level programming to erase, program and verify the chip.
- Slower, because codes are serially executed.
- Program memory can be erased using Normal-Voltage (4.5 – 5.5V) or Low-Voltage (2.5V – 4.5V).
- Enhanced ICSP
- Use external programmer and Programming Executive (PE).
- PE is stored in the on-chip memory.
- PE allows faster programming.
- PE can be downloaded to the chip by external programmer using the standard ICSP method.
- PE contains a small command set to erase, program and verify the chip, avoiding the need of low-level programming.
Hardware Interface
| Pin Label | Function | Pin Number |
|---|---|---|
| MCLR# | Programming Enable | 7 |
| VDD | Power Supply | 10, 26, 38, 57 |
| VSS | Ground | 9, 25, 41, 56 |
| PGC | Serial Clock | 17 |
| PGD | Serial Data | 18 |
| Product Name | Interface with PC | Interface with Device | Price (US) | Postage (US) | Total (US) |
|---|---|---|---|---|---|
| MPLAB® ICD 2 | USB or RS232 | 6-PIN RJ-12 connector | $159.99 | - | - |
| Full Speed USB Microchip ICD2 Debugger and Programmer |
USB | 6-PIN ICSP connector 6-PIN RJ-12 connector |
$72.00 | $12.00 | $84.00 |
| Mini Microchip Compatible ICD2 Debugger and Programmer |
RS232 | 6-PIN ICSP connector 6-PIN RJ-12 connector |
$45.00 | $10.00 | $55.00 |
| ICDX30 | RS232 | 6-pin RJ-11 | $51.00 | $47.46 | $98.46 |
| *Clone Microchip ICD2 (Now Using) | USB | 6-pin flat cables | $30.00 | $12.00 | $42.00 |
| Source | Schematic | PIC16F877A Bootloader |
|---|---|---|
| Patrick Touzet | Yes | HEX |
| Nebadje | Yes | Zip |
Software Interface
- The program can be written and compiled in an Integrated Development Environment (IDE) using either Assembly or C. The complied codes are then loaded to the device through the external programmer.
| Product Name | Features | OS | Price (US$) |
|---|---|---|---|
| MPLAB® IDE | Assembler Only | Windows | Free |
| MPLAB® C30 | Assembler and C-Compiler | Windows | $895.00 (Free student version1) |
| Piklab 0.12.0 | Assembler and C-Compiler | Linux | Free2 |
- Full-featured for the first 60 days. After 60 days, some code optimization functions are disabled. The compiler will continue to function after 60 days, but code size may increase.
- The current version supports external programmer ICD 2, but not yet tested.
RTSP: COM Port (Bootloader)
- RTSP works in normal voltage (MCLR# no need to raise to VIHH).
- No literature has mentioned the incorporation of Programming Executive (PE). Presumably, since Enhanced ICSP needs to set MCLR# to VIHH, RTSP cannot use PE.
- Refer to bootloader section.
IC Requirements
| Part No. | Description | Min Temp | Max Temp | Min Volt | Max Volt | Typ Cur | Max Cur |
|---|---|---|---|---|---|---|---|
| dsPIC30F5011-30I/PT | uP | -40oC | 85oC | 2.5V [1] | 5.5V | 145mA | 217mA |
| MAX3232ESE | RS232 driver | -40oC | 85oC | 3.0V | 5.5V | 0.3mA | 1.0mA |
| DS3695N | RS485 driver | -40oC | 85oC | 4.75V | 5.25V | 42mA | 60mA |
| DAC6574IDGS | 10-bit Quad-DAC I2C | -40oC | 105oC | 2.7V | 5.5V | 0.6mA | 0.9mA |
| 74HC14D | Quad-Schmitt Trigger | -40oC | 125oC | 2.0V | 6.0V | 0.02mA | |
| Overall | -40oC | 85oC | 4.75V | 5.25V | <300mA [2] | ||
| dsPIC33FJ128GP306-I/PT | uP | -40oC | 85oC | 3.0V [1] | 3.6V | 74mA | 250mA |
| ADM3485EARZ | RS485 driver | -40oC | 85oC | 3.0V | 3.6V | 1.1mA | 2.2mA |
| 24LC256-I/SN | 256kBits I2C EEPROM | -40oC | 85oC | 2.5V | 5.5V | 400uA | 3mA |
| LM3940IMP-3.3 | 5V-3.3V Regulator | -40oC | 125oC | 5.0V | 7.5V | 10mA | 250mA |
- Minimum voltage measured is 3.3V (with 2 LEDs blinking) running at 30MHz.
- Measured current at 5V is 180mA (with 2 LEDs blinking only)
Development Environment
Windows

- C-Compiler, Assembler and Linker are under GNU license.
- MPLAB C30 C Compiler (*.c -> *.s)
- MPLAB ASM30 Assembler (*.s -> *.o)
- MPLAB LINK30 Linker (*.o -> *.bin)
- PA optimizer, simulator, runtime libraries, header files, include files, and linker scripts are not covered by GNU. Reference is here.
- Microchip has integrated ASM30, LINK30, assembly header files, linker scripts in MPLAB IDE, which is free for download.
- MPLAB C30 costs US$895. A 60-day free student version is also available. After 60-days, the optimizer is automatically disabled, while other tools can still function properly. Refer to Table 2.4.
- C-libraries contained in C30 includes (Refer to 16-Bit Language Tools Libraries from Microchip).
| Library | Directory (\\Microchip\MPLAB C30) |
Major functions |
|---|---|---|
| DSP Library (e.g. libdsp-coff.a) |
\lib \src\dsp \support\h |
Vector, Matrix, Filter, etc. |
| 16-Bit Peripheral Libraries (e.g. libp30F5011-coff.a) |
\lib \src\peripheral \support\h |
ADC12, IOPort, UART, I2C, etc. |
| Standard C Libraries (e.g. libc-coff.a, libm-coff.a, libpic-coff.a) |
\lib \src\libm \include |
stdio.h, time.h, float.h, math.h, |
| MPLAB C30 Built-in Functions | none | _buildin_addab, _buildin_add, _buildinmpy, etc |
Linux

- C Compiler, Assembler and Linker are under GNU license.
- The code can be downloaded from Microchip at here.
- Current MPLAB ASM30 Assembler: v2.04
- Current MPLAB C30 Compiler: v2.04
- John Steele Scott has made templates that can be readily used by Debian-based systems.
- For v1.32, the necessary conversion to *.deb has been done already at here.
- Download pic30-1.32-debian.tar.bz2 for Template v1.32.
- Download pic30-binutils_1.32-1_i386.deb for the assember.
- Download pic30-gcc_1.32-1_i386.deb for the compiler.
- For v2.00
- goto http://www.baycom.org/~tom/dspic/
- download pic30-gcc-2.00-1.i386.rpm and pic30-binutils-2.00-1.i386.rpm
- convert to deb files
- install these two deb files
- For v3.01, convert the Toolchain following instructions at here
- Pre-install these packages: dpkg-dev, debhelper, bison, flex, sysutils, gcc-3.3, fakeroot
- cmd: sudo apt-get install dpkg-dev debhelper bison flex sysutils gcc-3.3 fakeroot
- Download and unzip template: pic30-3.01.tar.bz2
- Download assembler: mplabalc30v3_01_A.tar.gz. Save under /pic30-3.01/pic30-binutils-3.01/upstream/
- Download c-compiler: mplabc30v3_01_A.tgz. Save under /pic30-3.01/pic30-gcc-3.01/upstream/
- Install MPLAB_C30_v3_01-StudentEdition under Windows
- Copy directories /include, /lib, /support, and /bin/c30_device.info to pic30-3.01/pic30-support-3.01/upstream/
- Pack pic30-binutils into deb file
- goto /pic30-3.01/pic30-binutils-3.01/
- type cmd: dpkg-buildpackage -rfakeroot -b
- Pack pic30-gcc-3.01 into deb file
- goto /pic30-3.01/pic30-gcc-3.01/
- type cmd: dpkg-buildpackage -rfakeroot -b
- Pack pic30-gcc-3.01 into deb file
- goto /pic30-3.01/pic30-support-3.01/
- type cmd: dpkg-buildpackage -rfakeroot -b
- install pic30-binutils_3.01-1_i386.deb
- type cmd: sudo dpkg -i pic30-binutils_3.01-1_i386.deb
- install pic30-gcc_3.01-1_i386.deb
- type cmd: sudo dpkg -i pic30-gcc_3.01-1_i386.deb
- install pic30-support_3.01-1_all.deb
- type cmd: sudo dpkg -i pic30-support_3.01-1_all.deb
- Pre-install these packages: dpkg-dev, debhelper, bison, flex, sysutils, gcc-3.3, fakeroot
- Important Note: Only the compiler is free. The header files and library are owned by Microchip.
- Thomas Sailer suggested to download the Student version of C30 compiler and then build the libraries without source code. A package template for Fedora system is available here.
- Instructions for filling the upstream direction is available here.
- Alteratively, Stephan Walter has started a project to develop C Runtime Library for dsPIC.
- Current libraries in version 0.1.1 include: assert.h, cdefs.h, ctype.h, errno.h, inttypes.h, stdint.h, stdio.h, stdlib.h, string.h
- Burning Program Codes to Target Board
- Use 'dspicprg and dspicdmp' utilities developed by Homer Reid to burn hex code (*.hex) to devices. See Reference here. Through serial port only?
- Use Piklab IDE. Details on file format not known.
- Use MPLAB IDE to burn hex code (*.hex) to devices.
Code Optimization
- Below is a comparsion between different optimization levels for the project including drivers for 2 projects.
| Optimization | Description | Project 1 Code Size (byte) |
Project 1 Data Usage (byte) |
Project 2 Code Size (byte) |
Project 2 Data Usage (byte) |
|---|---|---|---|---|---|
| O0 | No optimization Fastest Compilation |
6222 (9%) | 178 (4%) | 26,037 (38%) | 710 (17%) |
| O1 | Optimize Tries to reduce code size and execution time. |
4473 (6%) | 178 (4%) | 22,290 (32%) | 710 (17%) |
| O2 | Optimize even more Performs nearly all supported optimizations that do not involve a space-speed trade-off. Increases both compilation time and the performance of the generated code. |
4422 (6%) | 178 (4%) | 21,993 (32%) | 710 (17%) |
| O3 | Optimize yet more. O3 turns on all optimizations specified by O2 and also turns on the inline-functions option. |
4485 (6%) | 178 (4%) | 22,176 (32%) | 710 (17%) |
| Os | Optimize for size. Os enables all O2 optimizations that do not typically increase code size. It also performs further optimizations designed to reduce code size. |
4356 (6%) | 178 (4%) | 21,885 (32%) | 710 (17%) |
Software Architecture
+--------+--------+--------+--------+--------+
Application | Task 1 | Task 2 | Task 3 | Task 4 | Task 5 |
+--------+--------+--------+--------+--------+
| POSIX API |
+-------------------+------------------------+
OS | Coroutine | FreeRTOS Scheduler |
+-------------------+------------------------+
| Drivers |
+------+-----+-----+--------+-------+--------+
Hardware | UART | ADC | DAC | EEPROM | PWM | TIMERS |
+------+-----+-----+--------+-------+--------+
- Currently, operating system is based on FreeRTOS incorporating coroutine developed by Simon Tatham
- Software Drivers are to be developed to allow users at Application Level to use the hardware (e.g. ADC, DAC, UART, EEPROM etc) through the OS.
- The interface between the drivers and the OS is based on POSIX standard (e.g. open(), write(), read(), ioctl(), usleep() etc).
- The most up-to-date development can be found at repository freertos_posix
Programming Tips
Memory Map for 5011
| Type | Start Address | End Address | Size |
|---|---|---|---|
| Flash | 0x000000 | 0x00AFFF | 44K[1] |
| +--Flash: Reset Vector | 0x000000 | 0x000003 | 4 |
| +--Flash: Interrupt Vector Table | 0x000004 | 0x00007F | 124 |
| +--Flash: Alternate Vector Table | 0x000084 | 0x0000FF | 124 |
| +--Flash: User Program | 0x000100 | 0x00AFFF | 43.7K |
| EEPROM | 0x7FFC00 | 0x7FFFFF | 1K[2] |
| Programming Executive | 0x800000 | 0x8005BF | 1472 |
| Unit ID | 0x8005C0 | 0x8005FF | 64 |
| Config Registers | 0xF80000 | 0xF8000F | 16 |
| Device ID | 0xFF0000 | 0xFF0003 | 4 |
[1] Each address is 16-bit wide. Every two addresses correspond to a 24-bit instruction. Each even address contains 2 valid bytes; each odd address contains 1 valid byte plus 1 phathom byte.
[2] Each address is 8-bit wide.
Data Location
| Type | Description | Example |
|---|---|---|
| _XBSS(N) [1] | RAM Data in X-memory, aligned at N, no initilization | int _XBSS(32) xbuf[16]; |
| _XDATA(N) [1] | RAM Data in X-memory, aligned at N, with initilization | int _XDATA(32) xbuf[] = {1, 2, 3, 4, 5}; |
| _YBSS(N) [1] | RAM Data in Y-memory, aligned at N, no initilization | int _YBSS(32) ybuf[16]; |
| _YDATA(N) [1] | RAM Data in Y-memory, aligned at N, with initilization | int _YDATA(32) ybuf[16] = {1, 2, 3, 4, 5}; |
| __attribute__((space(const))) | Flash ROM data, constant, accessed by normal C statements, but 32K max. |
int i __attribute__((space(const))) = 10; |
| __attribute__((space(prog))) | Flash ROM data, read/write by program space visibility window (psv) |
int i __attribute__((space(prog))); |
| __attribute__((space(auto_psv))) | Flash ROM data, read by normal C statements, write by accessing psv |
int i __attribute__((space(auto_psv))); |
| __attribute__((space(psv))) | Flash ROM data, read/write by (psv) | int i __attribute__((space(psv))); |
| _EEDATA(N) [1] | ROM Data in EEPROM, aligned at N, read/write with psv | int _EEDATA(2) table[]={0, 1, 2, 3, 5, 8}; |
| _PERSISTENT | RAM Data, data remain after reset | int _PERSISTENT var1, var2; |
| _NEAR | RAM Data at near section | int _NEAR var1, var2; |
| _ISR | Interrupt service rountine | void _ISR _INT0Interrupt(void); |
| _ISRFAST | Fast interrupt service rountine | void _ISRFAST _T0Interrupt(void); |
- N must be a power of two, with a minimum value of 2.
Configuration Bits
- System clock source can be provided by:
- Primary oscillator (OSC1, OSC2)
- Secondary oscillator (SOSCO and SOSCI) with 32kHz crystal
- Internal Fast RC (FRC) oscillator at 7.37MHz (7372800Hz)
- Low-Power RC (LPRC) oscillator (Watchdog Timer) at 512 kHz.
- These clock sources can be incorporated with interal Phase-locked-loop (PLL) x4, x8 or x16 to yield the osciallator frequrence FOSC
- The system clock is divided by 4 to yield the internal instruction cycle clock, FCY=FOSC/4
- FRC with PLLx16 is used to achieve FCY=29.49MHz (29491200Hz or 30MIPS)
//The code (MACRO) below is to be placed at the top of program (before main)
_FOSC(CSW_FSCM_OFF & FRC_PLL16);
_FWDT(WDT_OFF); //Turn off Watchdog Timer
_FBORPOR(PBOR_ON & BORV_27 & MCLR_DIS & PWRT_16);
_FGS(CODE_PROT_OFF); //Disable Code Protection
Timer
- Each timer is 16-bit (i.e. counting from 0 to 65535).
- Timer 2 and 3 can be incorporated together to form a 32-bit timer.
- Prescale is the ratio between timer counts and system clock counts. Prescales of 1:1, 1:8, 1:64 and 1:256 are available.
- Timers may be used to implement free time clock or mesaure time.
Free Time Clock
- Let required time for ticking be PERIOD.
- Number of instruction cycles during PERIOD = PERIOD*FCY cycles
- Using a prescale of 1:x, the timer period count register = # of cycles/x
- e.g. PERIOD = 10ms; # of cycles = 10ms*30MHz = 300000 cylces; Using 1:64 Prescale, register setting = 300000/64 = 4688
void time_init(void){
TMR1 = 0; // Clear register
PR1 = 4688; // Set period
//============================================================
_T1IF = 0; // Clear interrupt flag
_T1IE = 1; // Enable interrupts
//============================================================
T1CONbits.TCS = 0; // Use internal clock source
T1CONbits.TCKPS = 2; // Prescale Select 1:64
T1CONbits.TON = 1; // Start the timer
}
//********************************************************************
void _ISRFAST _T1Interrupt(void){
_T1IF = 0; // Clear interrupt flag
//Place user code here
}
Time Measurement
- To measure the time taken for action(), use the code below:
unsigned int measure_time(void){
PR3 = 0xFFFF; // Set counter to maximum
_T3IF = 0; // Clear interrupt flag
_T3IE = 0; // Disable interrupt
T3CONbits.TON = 1; // Start the timer, TMR3 count up
TMR3 = 0; //Clear TMR3 to start count up
//====================================================
//Add code here to wait for something to happen
action();
//====================================================
T3CONbits.TON = 0; //Stop the timer
//====================================================
return (unsigned int) TMR3/FCY; //TMR/FCY yields the actual time
}
Interrupt
- Registers are involved in Interrupts includes:
- Interrupt Flag Status (IFS0-IFS2) registers
- Interrupt Enable Control (IEC0-IEC2) registers
- Interrupt Priority Control (IPC0-IPC10) registers
- Interrupt Priority Level (IPL) register
- Global Interrupt Control (INTCON1, INTCON2) registers
- Interrupt vector (INTTREG) register
- User may assign priority level 0-7 to a specific interrupt using IPC. Setting priority to 0 disable a specific interrupt. Level 7 interrupt has the highest priority.
- Current priority level is stored in bit<7:5> of Status Register (SR). Setting Interrupt Priority Level (IPL) to 7 disables all interrupts (except traps).
- sti() and cli() can be defined to enable and disable global interrupts for time critical functions:
#define IPL ( 0x00e0 )
#define cli() SR |= IPL //Set IPL to 7
#define sti() SR &= ~IPL //Set IPL to 0
//============================================================
char adc_ioctl(unsigned char request, unsigned char* argp){
//...
cli(); //Disable global interrupt
for(;ch<=argp[0];ch++)
adc_add_ch(argp[ch]); //Add adc channels
sti(); //Enable global interrupt
//...
return 0;
}
- dsPic30F has an errate note on the Interrupt Controller. When Nested Interrupt is turned on (NSTDIS=0 by default), a high priority interrupt negating a low priority interrupt may result in an Address Error.
- To work around the problem, it is suggested by Microchip to use the following MACRO to protect:
- the clearing of Interrput Flag
- the disabling of Interrupt Enable
- the lowering of Interrupt Priority
- the modification of IPL in Status Register to 1-6
#define DISI_PROTECT(X) { \
__asm__ volatile ("DISI #0x1FFF");\
X; \
DISICNT = 0; \
}
- For example,
void _ISR _T1Interrupt( void )
{
DISI_PROTECT(IFS0bits.T1IF = 0);
//do something here...
}
UART
- 5011 provides two UART channels UxART, for x=1, 2.
- UxMODE, UxSTA, UxBRG are registers used to set the mode, indicate the status, and set the baud rate respectively.
- For UART communications compatiable with RS232 standard, an external driver (e.g. MAX3232ESE) is needed.
- For UART communications compatiable with RS485 standard, an external driver (e.g. DS3695N) is needed.
Auto baud rate detection
- The method is provided by ingenia bootloader.
- The PC sends a ASCII character 'U' (0x55) to the target board.
- On the first rising edge of the start bit, the target board starts the timer.
- At the fifth rising edge, the timer is stopped, let the count number be t_count.
- The measured period corresponds to 8 bits transmitted at a baud rate uxbrg.
_ _ _ _ _ _ _|S|_|1|_|1|_|1|_|1|_|S|_ (S = Start Bit) <---------------> Measured Time
- The relationship between uxbrg and TMR is
Measured Time (in seconds) = t_count/Fcy
uxbrg = 1/(Measured Time/8)
= 8*Fcy/t_count
- Since UxBRG is computed by:
UxBRG = (Fcy/(16*Baudrate)) -1
= (Fcy/(16*8*Fcy/t_count)) -1
= t_count/128 -1
- The following is the code for auto baud rate detection for U2ART:
unsigned int uart2_autobaud(void){
U2MODEbits.ABAUD = 1; //Enable Autobaud detect from U2RX (from IC2 if 0)
U2MODEbits.UARTEN = 1; //U2ART enable
//Timer 3 Config==========================================================
PR3 = 0xFFFF; // Set counter to maximum
_T3IF = 0; // Clear interrupt flag
_T3IE = 0; // Disable interrupt
T3CONbits.TON = 1; // Start the timer, TMR3 count up
//Input Capture Config====================================================
IC2CONbits.ICM = 3; //Detect rising
_IC2IF = 0; //Clear interrupt flag
_IC2IE = 0; //Disable interrupt
//Start Auto baud detection===============================================
unsigned int i=0;
cli(); //Disable Global Interrupt
while(!_IC2IF); //1st rising edge detected
TMR3 = 0; //Clear TMR3 to start count up
_IC2IF = 0; //Clear interrupt flag
while(!_IC2IF); //2nd rising edge detected
_IC2IF = 0; //Clear interrupt flag
while(!_IC2IF); //3rd rising edge detected
_IC2IF = 0; //Clear interrupt flag
while(!_IC2IF); //4th rising edge detected
_IC2IF = 0; //Clear interrupt flag
while(!_IC2IF); //5th rising edge detected
_IC2IF = 0; //Clear interrupt flag
T3CONbits.TON = 0; //Stop the timer
sti(); //Enable Global Interrupt
//Compute value for BRG register==========================================
unsigned int time;
time = ((TMR3+0x40)>>7)-1; //+0x40 for rounding
//========================================================================
return time;
}
- For 30MIP, tested speeds of transmission include 9600bps, 19200bps, 28800bps, 38400bps and 57600bps.
open()
- The following structures and variables are used as circular buffers for transmit and receive.
struct UART_Rx{
unsigned char wr;
unsigned char rd;
};
struct UART_Tx{
unsigned char wr;
unsigned char rd;
unsigned char tx_complete_flag;
};
struct UART_Rx uart_rx;
struct UART_Tx uart_tx;
unsigned char uart_rx_buf[MAX_UART_RX_BUF];
unsigned char uart_tx_buf[MAX_UART_TX_BUF];
char uart_open()
{
uart_rx.wr = 0;
uart_rx.rd = 0;
uart_tx.wr = 0;
uart_tx.rd = 0;
uart_tx.tx_complete_flag = 1;
uart2_init();
return 0;
}
void uart2_init(void){
unsigned int u2brg = 97;
#if(AUTO_BAUD_DECT>0)
u2brg = uart2_autobaud();
#endif
U2BRG = u2brg;
//=================================================================
// Disable U2ART
U2MODEbits.UARTEN = 0; //Disable U2ART module
//=================================================================
// Configure Interrupt Priority
_U2RXIF = 0; //Clear Rx interrupt flags
_U2TXIF = 0; //Clear Tx interrupt flags
_U2RXIE = 1; //Receive interrupt: 0 disable, 1 enable
_U2TXIE = 1; //Transmit interrupt: 0 disable, 1 enable
//=================================================================
// Configure Mode
// +--Default: 8N1, no loopback, no wake in sleep mode, continue in idle mode
// +--Diable autobaud detect
// +--Enable U2ART module
U2MODEbits.ABAUD = 0; //Disable Autobaud detect from U2RX
U2MODEbits.UARTEN = 1; //U2ART enable
//=================================================================
// Configure Status
// +--Default: TxInt when a char is transmitted, no break char
// +--Default: RxInt when a char is received, no address detect, clear overflow
// +--Enable Transmit
U2STAbits.UTXEN = 1; //Tx enable
}
write()
- This function writes a series of bytes to the circular buffer and start transmission.
int uart_write(unsigned char *buf, int count)
{
//If transimt has not completed, return busy
if(uart_tx.tx_complete_flag == 0){
return -1;
}
else{
uart_tx.tx_complete_flag = 0;
}
int next_data_pos;
int byte = 0;
for (; byte<count; byte++) {
next_data_pos = pre_wr_cir254buf( (unsigned char)uart_tx.wr,
(unsigned char)uart_tx.rd,
MAX_UART_TX_BUF);
if (next_data_pos!=255) {
//Valid data is available
uart_tx_buf[uart_tx.wr] = (unsigned char) buf[byte]; //copy the char to tx_buf
uart_tx.wr = next_data_pos; //increment the ptr
} else break;
}
//Raise Interrupt flag to initiate transmission
_U2TXIF = 1; //Start interrupt
return byte;
}
- The interrupt routine reads from the circular buffer and send the data. The uart is opened such that the module will generate an TX Interrupt when it a byte is sent.
void _ISR _U2TXInterrupt(void){
DISI_PROTECT(_U2TXIF = 0); //Clear Interrupt Flag
unsigned char next_data_pos;
next_data_pos = pre_rd_cir254buf( (unsigned char)uart_tx.wr,
(unsigned char)uart_tx.rd,
MAX_UART_TX_BUF);
if (next_data_pos!= 255) {
//Valid Data is available to transmit
U2TXREG = (uart_tx_buf[(unsigned char)uart_tx.rd] & 0xFF); //send next byte...
uart_tx.rd = (unsigned char) next_data_pos; //update rd pointer
} else {
//Transimission has completed
uart_tx.tx_complete_flag = 1; // change to empty of tx
}
}
read()
- The interrupt routine writes to the circular buffer when space is available.
void _ISR _U2RXInterrupt(void){
unsigned char next_data_pos;
if ( U2STAbits.URXDA ){
next_data_pos = pre_wr_cir254buf( uart_rx.wr, uart_rx.rd, MAX_UART_RX_BUF);
if (next_data_pos!=255) {
//If buffer is not full
uart_rx_buf[uart_rx.wr] = (unsigned char) U2RXREG; //Read the data from buffer
uart_rx.wr = next_data_pos;
}
else{
//When buffer is full, still remove data from register, butthe incoming data is lost
next_data_pos = (unsigned char) U2RXREG; //Read the data from buffer
}
}
DISI_PROTECT(_U2RXIF = 0); //Clear the flag
}
- This function reads one byte from the circular buffer.
int uart_read(unsigned char *buf)
{
int next_data_pos;
next_data_pos = pre_rd_cir254buf( uart_rx.wr, uart_rx.rd, MAX_UART_RX_BUF);
//Copy 1 byte when data is available
if (next_data_pos!=255)
{
*buf = uart_rx_buf[uart_rx.rd]; //copy the stored data to buf
uart_rx.rd = next_data_pos; //update the ptr
return 1;
}
//No data can be copied
else
{
return 0;
}
}
I2C
- Two lines are devoted for the serial communication. SCL for clock, SDA for data.
- Standard communication speed includes
- Standard speed mode: 100kHz
- Fast speed mode: 400kHz
- High speed mode: 3.4MHz
- dsPIC30f5011 supports standard and fast speed modes. The maximum speed attainable is 1MHz.
- Pull-up resistors are required for both SCL and SDA. Minimum pull-up resistance is given by:
Pull-up resistor (min) = (Vdd-0.4)/0.003 ...... [See section 21.8 in Family reference manual]
- 2.2Kohm is typical for standard speed mode.
- After initiating a start/stop/restart bit, add a small delay (e.g. no operation) before polling the corresponding control bit (hardware controlled).
- After sending a byte and receiving an acknowledgement from the slave device, ensure to change to idle state.
open()
- The following structure is used to record whether special bits are needed to be sent.
typedef union{
unsigned char val;
struct{
unsigned START:1; //start
unsigned RESTART:1; //restart
unsigned STOP:1; //stop
unsigned NACK:1; //not acknowledgment
unsigned :1;
unsigned :1;
unsigned :1;
unsigned :1;
}bits;
} I2C_STATUS;
static I2C_STATUS i2c_status;
- Initializing I2C with default speed I2C_BRG without interrupts.
void i2c_open(void)
{
//Open i2c if not already opened
if(I2CCONbits.I2CEN == 0)
{
_SI2CIF = 0; //Clear Slave interrupt
_MI2CIF = 0; //Clear Master interrupt
_SI2CIE = 0; //Disable Slave interrupt
_MI2CIE = 0; //Disable Master interrupt
I2CBRG = I2C_BRG;
I2CCONbits.I2CEN = 1; //Enable I2C module
i2cIdle(); //I2C bus at idle state, awaiting transimission
i2c_status.val = 0; //clear status flags
}
}
ioctl()
- Use this function before read/write to append special bits before or after the data byte.
char i2c_ioctl(unsigned char request, unsigned char* argp)
{
switch(request){
case I2C_SET_STATUS:
i2c_status.val = *argp;
break;
default:
return -1; //request code not recognised
}
return 0;
}
write()
- This function sends an 8-bit data using the I2C protocol.
Mst/Slv _______ M ____M___ S M ________
SDA (Data) |S| data |A|S|
|T| |C|T|
|A|XXXXXXXX|K|P|
- Use ioctl() to select whether a start/restart/stop bit is required.
- If slave does not respond after ACK_TIMEOUT, the transmission is considered unsucessful.
int i2c_write(unsigned char *buf)
{
unsigned int count = 0;
if(i2c_status.bits.START)
{
I2CCONbits.SEN = 1;
Nop(); //A small delay for hardware to respond
while(I2CCONbits.SEN); //Wait till Start sequence is completed
}
else if(i2c_status.bits.RESTART)
{
I2CCONbits.RSEN = 1;
Nop(); //A small delay for hardware to respond
while(I2CCONbits.RSEN); //Wait till Start sequence is completed
}
I2CTRN = *buf; //Transmit register
while(I2CSTATbits.TBF); //Wait for transmit buffer to empty
while(I2CSTATbits.ACKSTAT){
if(++count > ACK_TIMEOUT){
//Slave did not acknowledge, byte did not transmit sucessfully,
//send stop bit to reset i2c
I2CCONbits.PEN = 1;
Nop(); //A small delay for hardware to respond
while(I2CCONbits.PEN); //Wait till stop sequence is completed
i2cIdle();
return 0;
}
}
i2cIdle();
if(i2c_status.bits.STOP)
{
I2CCONbits.PEN = 1;
Nop(); //A small delay for hardware to respond
while(I2CCONbits.PEN); //Wait till stop sequence is completed
i2cIdle();
}
i2c_status.val = 0; //Clear status
return 1;
}
read()
- This function reads 1 byte from slave using the I2C protocol.
Mst/Slv ____ ___S____ M M _____
SDA (Data) | data |A|S|
| |C|T|
|XXXXXXXX|K|P|
- Use ioctl() to select whether an ACK/NACK and/or STOP bit is needed to be sent.
int i2c_read(unsigned char *buf)
{
I2CCONbits.RCEN = 1; //Enable Receive
while(I2CCONbits.RCEN);
I2CSTATbits.I2COV = 0; //Clear receive overflow
*buf = (unsigned char) I2CRCV; //Access the receive buffer
I2CCONbits.ACKDT = (i2c_status.bits.NACK)? 1 : 0;
I2CCONbits.ACKEN = 1; //Send Acknowledgement/Not Acknowledgement
i2cIdle(); //I2C bus at idle state, awaiting transimission
if(i2c_status.bits.STOP)
{
I2CCONbits.PEN = 1;
Nop(); //A small delay for hardware to respond
while(I2CCONbits.PEN); //Wait till stop sequence is completed
i2cIdle();
}
i2c_status.val = 0; //Clear status
return 1;
}
Example
Mst/Slv _______ M ___M___ M S ____M___ S M ___M___ M S ___S____ M ___S____ M M _____
SDA (Data) |S| | |A| |A|R| | |A| |A| |N|S|
|T|address|W|C|channelA|C|E|address|R|C| Data H |C| Data L |A|T|
|A|1001111|0|K|00010010|K|S|1001111|1|K|10101010|K|10XXXXXX|K|P|
/* * Send start bit, slave address (Write Mode) */ status = I2C_START; i2c_ioctl(I2C_SET_STATUS, &status); data = (unsigned char) I2C_SLAVE_ADDR; i2c_write(&data); /* * Send control byte: Channel select */ data = (unsigned char) ctrl_byte; i2c_write(&data); /* * Send restart bit, slave address (Read Mode) */ status = I2C_RESTART; i2c_ioctl(I2C_SET_STATUS, &status); data = (unsigned char) (I2C_SLAVE_ADDR|0x01); i2c_write(&data); /* * Receive High Byte with Acknowledgment */ i2c_read(&data); usr_data.high = (unsigned char) data; /* * Receive Low Byte with Not Acknowledgment and stop bit */ status = I2C_NACK | I2C_STOP; i2c_ioctl(I2C_SET_STATUS, &status); i2c_read(&data); usr_data.low = (unsigned char) data;
ADC
- 12-bit ADC: (Max 16 Channels)
- Allow a maximum of 2 sets of analog input multiplexer configurations, MUX A and MUX B (Normally use one only).
- A maximum of 200kps of sampling rate when using auto sampling mode.
open()
- The following variables are required.
unsigned int adc_buf[ADC_MAX_CH]; //Store most updated data volatile unsigned int* ADC16Ptr = &ADCBUF0; //Pointer to ADC register buffer, unsigned char adc_ch_select = 0; //Pointer to channel to be read from unsigned char adc_data_ready = 0; //Indicate if RAM data is ready for output
- Configuration is highlighted below.
- Interrupt: The ADC module will be set to interrupt when the specified channels are updated.
- I/O: Set the corresponding TRISBX bits (digit i/o config) to input (i.e. = 1), and set corresponding bits in ADPCFG (analog config) to zero.
- Scanning Mode: Scan mode is used. In this mode, the Sample and Hold (S/H) is switched between the channels specified by ADCSSL (Scan select register).
- Reference Voltage for S/H: Only MUX A is used. By default, the negative reference voltage of the S/H is connected to VREF-.
- Settings for ADC Operation: For 200kbps operation, the voltage references for the ADC voltage are connected to VREF+ and VREF-. Scan input is enabled, and the module will generate an interrupt when all selected channels have been scanned.
- Sampling Rate: TAD refers to the time unit for the ADC clock. To configure the ADC module at 200kbps, the minimum sampling time of 1TAD = 334ns is required. ADCS<5:0> in ADCON3 register is used to set the time, which is given by:
ADCS<5:0> = 2(TAD/TCY)-1
= 2(334e-9/33.34e-9)-1
= 19
char adc_open(int flags)
{
// Configure interrupt
_ADIF = 0; //clear ADC interrupt flag
_ADIE = 1; //enable adc interrupt
// Configure analog i/o
_TRISB0 = 1;
_TRISB1 = 1;
ADPCFG = 0xFFFC; //Enable AN0 (Vref+) and AN1 (Vref-)
// Configure scan input channels
ADCSSL = 0x0003; //0 => Skip, 1 => Scan
// Configure CH0 Sample and Hold for 200kbps
// +-- Use MUX A only
// +-- Set CH0 S/H -ve to VRef-
ADCHSbits.CH0NA = 0;
// ADCCON3:
// +--Auto Sample Time = 1TAD
// +--A/D Conversion Clock Source = system clock
// +--A/D Conversion Clock Select ADCS<5:0>= 2(TAD/TCY)-1
// 200kbps(Sampling frequency)
ADCON3bits.SAMC = ADC_ACQ_TIME; //1TAD for sampling time
ADCON3bits.ADRC = 0; //Use system clock
ADCON3bits.ADCS = ADC_ADCS; //each conversion requires 14TAD
// ADCCON2:
// +--Default: Use MUX A, No splitting of Buffer
// +--Voltage Reference Configuration Vref+ and Vref-
// +--Scan Input Selections
// +--5 samples between interrupt
ADCON2bits.VCFG = 3; //External Vref+, Vref-
ADCON2bits.CSCNA = 1; //Scan input
ADCON2bits.SMPI = 1; //take 2 samples (one sample per channel) per interrupt
// ADCCON1:
// +--Default: continue in idle mode, integer format
// +--Enable ADC, Conversion Trigger Source Auto, Auto sampling on
ADCON1bits.FORM = 0; //[0:integer]; [2 fractional]; [3 siged fractional]
ADCON1bits.SSRC = 7; //auto covert, using internal clock source
ADCON1bits.ASAM = 1; //auto setting of SAMP bit
ADCON1bits.ADON = 1; //Turn on module
return 0;
}
read()
- 16 registers (ADCBUF0 -ADCBUF15) are dedicated to store the ADC data between interrupts. However, the data in ADCBUFx does not necessarily correspond to the data taken for channel x. Since the lowest register will always be filled first, when some of the channels are not scanned (i.e. skipped), care must be taken. The following code checks the ADCSSL register for the current scanning channels and moves the data to the corresponding position in *adc_buf.
void _ISR _ADCInterrupt(void){
unsigned int channel = 0;
unsigned int buffer = 0;
for (; channel<ADC_MAX_CH; channel++)
{
if(select(channel)) //Check if channel has been selected
{
adc_buf[channel] = ADC16Ptr[buffer]; //Copy data to adc_buf
buffer++;
}
}
adc_data_ready = 1;
DISI_PROTECT(_ADIF = 0); //Clear adc interrupt
}
static unsigned char select(unsigned char ch)
{
unsigned int mask;
mask = 0x0001 << ch;
if(ADCSSL & mask)
return 1;
return 0;
}
- User can read from the buffer at anytime to get the most updated analog values.
int adc_read(unsigned int* buf, int count)
{
if(adc_data_ready == 1)
{
int num_channel = count/2; //number of channels to read
unsigned char channel = adc_ch_select; //index for adc_buf
int i = 0; //index for buf
while(i<num_channel && channel<ADC_MAX_CH)
{
//Loop only for specified number of channel or all channels
buf[i++] = adc_buf[channel++]; //use data in local buffer
while(select(channel)==0)
{ //increment to next valid channel
channel++;
if(channel >= ADC_MAX_CH) break;
}
}
return 2*i;
}
return -1;
}
ioctl()
- This function is used to add or remove channels from the ADC scanning process.
char adc_ioctl(unsigned char request, unsigned char* argp)
{
switch(request)
{
case ADC_ADD_CH:
//ADD channels to current set==========================
cli(); //Disable global interrupt
if(select(argp[0]) == 0){ //If channel not in scan list
adcAdd(argp[0]); //Add individual channel to scan list
adc_data_ready = 0; //First data not ready yet, until interrupt occurs
}
adc_ch_select = argp[0]; //Select current channel for reading
sti(); //Enable global interrupt
break;
case ADC_RM_CH:
//REMOVE channels from current set==========================
cli(); //Disable global interrupt
if(select(argp[0])){ //If channel in scan list
adcRm(argp[0]); //Remove individual channel
adc_ch_select = 0; //Reset to AN0
}
sti(); //Enable global interrupt
break;
default:
return -1; //request code not recognised
}
return 0;
}
- Channels may be added or removed by changing _TRISBX, ADPCFG, ADCSSL and ADCON2bits.SMPI.
void adc_add_ch(unsigned char ch){
unsigned int mask;
mask = 0x0001 << ch;
TRISB = TRISB | mask;
ADCSSL = ADCSSL | mask;
ADPCFG = ~ADCSSL;
ADCON2bits.SMPI++; //take one more sample per interrupt
}
void adc_rm_ch(unsigned char ch){
unsigned int mask;
mask = 0x0001 << ch;
ADPCFG = ADPCFG | mask;
ADCSSL = ~ADPCFG;
ADCON2bits.SMPI--; //take one less sample per interrupt
}
EEPROM
- 5011 has 1024 bytes of EEPROM, readable and writable under normal voltage (5V).
- To use, declare:
unsigned char _EEDATA(2) eeData[1024]={ 0x00, 0x00, 0x00, 0x00, .... }
unsigned int byte_pointer = 0;
lseek()
- This function moves the pointer to the desired position before a reading/writing operation is performed.
int eeprom_lseek(int offset, unsigned char whence){
byte_pointer = offset;
return byte_pointer;
}
read()
- This function read count bytes from the eeprom.
int eeprom_read(unsigned char* buf, int count){
int i=0;
for(; i<count && byte_pointer < 1024; i++){
readEEByte( __builtin_tblpage(eeData),
__builtin_tbloffset(eeData) + byte_pointer,
&buf[i]);
byte_pointer++; //Update global pointer
}
return i; //read i bytes successful
}
- readEEByte() is implemented in assembly code as follows:
.global _readEEByte
_readEEByte:
push TBLPAG ;w0 = base of eeData
mov w0, TBLPAG ;w1 = offset for eeData in byte
tblrdl.b [w1], [w2] ;w2 = pointer to user buffer
pop TBLPAG
return
write()
- This function write count bytes to eeprom.
int eeprom_write(unsigned char* buf, int count){
char isOddAddr = byte_pointer%2; //current address is odd
char isOddByte = count%2; //number of bytes to write is odd
//=================================================================
unsigned int word_offset = byte_pointer>>1; //div by 2 and round down
int max_write;
max_write = (isOddAddr == 0 && isOddByte == 0) ? (count>>1) : (count>>1)+1;
//=================================================================
unsigned int word_data; //Store word to be written
int byte_wr = 0; //number of bytes written, i.e buffer pointer
int i = 0;
//=================================================================
for(; i<max_write && word_offset<512; i++, word_offset++){
if(i==0 && isOddAddr){
//First byte not used
//============================================save first byte
readEEByte( __builtin_tblpage(eeData),
__builtin_tbloffset(eeData) + byte_pointer - 1,
&word_data);
//===========================================================
word_data = ((unsigned int)buf[0] << 8) + (0xFF & word_data);
byte_wr++; //Update buffer pointer
byte_pointer++; //Update global pointer
} else if(i==max_write-1 && ((isOddAddr && sOddByte==0)||(isOddAddr==0 && isOddByte))){
//Last byte not used
//=============================================save last byte
readEEByte( __builtin_tblpage(eeData),
__builtin_tbloffset(eeData) + byte_pointer + 1,
&word_data);
//============================================================
word_data = (word_data << 8) + buf[byte_wr];
byte_wr++; //Update buffer pointer
byte_pointer++; //Update global pointer
} else{
//Both bytes valid
word_data = ((unsigned int)buf[byte_wr+1] << 8) + buf[byte_wr];
byte_wr+=2; //Update buffer pointer
byte_pointer+=2; //Update global pointer
}
//==================================================================
eraseEEWord( __builtin_tblpage(eeData),
__builtin_tbloffset(eeData) + 2*word_offset);
writeEEWord( __builtin_tblpage(eeData),
__builtin_tbloffset(eeData) + 2*word_offset,
&word_data);
//==================================================================
}
return byte_wr; //No. of byte written
}
- eraseEEWord and writeEEWord are implemented in assembly.
.global _eraseEEWord
_eraseEEWord:
push TBLPAG
mov w0, NVMADRU ;w0 = base of eeData
mov w1, NVMADR ;w1 = offset for eeData in word
mov #0x4044, w0
mov w0, NVMCON ;Set to erase operation
push SR ;Disable global interrupts
mov #0x00E0, w0
ior SR
mov #0x55, w0 ;Write the KEY sequence
mov w0, NVMKEY
mov #0xAA, w0
mov w0, NVMKEY
bset NVMCON, #15 ;Start the erase cycle, bit 15 = WR
nop
nop
L1: btsc NVMCON, #15 ;while(NVMCONbits.WR)
bra L1
clr w0
pop SR ;Enable global interrupts
pop TBLPAG
return
.global _writeEEWord
_writeEEWord:
push TBLPAG ;w0 = base of eeData
mov w0, TBLPAG ;w1 = offset for eeData in byte
tblwtl [w2], [w1] ;w2 = pointer to user buffer
mov #0x4004, w0 ;Set to write operation
MOV w0, NVMCON
push SR ;Disable global interrupts
mov #0x00E0, w0
ior SR
mov #0x55, w0 ;Write the KEY sequence
mov w0, NVMKEY
mov #0xAA, w0
mov w0, NVMKEY
bset NVMCON, #15 ;Start the erase cycle, bit 15 = WR
nop
nop
L2: btsc NVMCON, #15 ;while(NVMCONbits.WR)
bra L2
clr w0
pop SR ;Enable global interrupts
pop TBLPAG
return
Simple PWM (Output Compare Module)
- The PWM module consists of 8 channels using the output compare module of dsPic.
- These channels are locate at pin 46 (OC1), 49 (OC2), 50 (OC3), 51 (OC4), 52 (OC5), 53 (OC6), 54 (OC7), 55 (OC8). These pins are shared with port D.
- The range of PWM freqeuencies obtainable is 2Hz to 15MHz (See Figure 6.3). Suggested range of operation is 2Hz to 120kHz. The relationship between resolution r and PWM frequency fPWM is given by:
fPWM = fCY/(Prescale*10rlog(2))
| Resolution (bit) | Prescale=1 | Prescale=8 | Prescale=64 | Prescale=256 |
|---|---|---|---|---|
| 1 | 15,000,000 | 1,875,000 | 234,375 | 58,594 |
| 2 | 7,500,000 | 937,500 | 117,188 | 29,297 |
| 3 | 3,750,000 | 468,750 | 58,594 | 14,648 |
| 4 | 1,875,000 | 234,375 | 29,297 | 7,324 |
| 5 | 937,500 | 117,188 | 14,648 | 3,662 |
| 6 | 468,750 | 58,594 | 7,324 | 1,831 |
| 7 | 234,375 | 29,297 | 3,662 | 916 |
| 8 | 117,188 | 14,648 | 1,831 | 458 |
| 9 | 58,594 | 7,324 | 916 | 229 |
| 10 | 29,297 | 3,662 | 458 | 114 |
| 11 | 14,648 | 1,831 | 229 | 57 |
| 12 | 7,324 | 916 | 114 | 29 |
| 13 | 3,662 | 458 | 57 | 14 |
| 14 | 1,831 | 229 | 29 | 7 |
| 15 | 916 | 114 | 14 | 4 |
| 16 | 458 | 57 | 7 | 2 |
open()
- A timer (either Timer 2 or 3) is needed to determine the pwm period. The following code uses timer 2 for all 8 channels.
void pwm_open(void){
OC1CON = 0; OC2CON = 0; //Disable all output compare modules
OC3CON = 0; OC4CON = 0;
OC5CON = 0; OC6CON = 0;
OC7CON = 0; OC8CON = 0;
//============================================================
TMR2 = 0; // Clear register
PR2 = 0xFFFF; // Set to Maximum
//============================================================
_T2IF = 0; // Clear interrupt flag
_T2IE = 0 // Enable interrupts
//============================================================
T2CONbits.TCS = 0; // Use internal clock source
T2CONbits.TCKPS = 0; // Prescale Select 1:1
//============================================================
T2CONbits.TON = 1; // Start the timer
}
ioctl()
- User should select the channel and set the pwm period using the functions below before issuing the duty cycle:
char pwm_ioctl(unsigned char request, unsigned long* argp){
unsigned int value;
unsigned char mask;
switch(request){
case PWM_SET_PERIOD:
return setPeriodNPrescale(argp[0]);
case PWM_SELECT_CH:
pwm_channel = argp[0];
mask = 0x01 << pwm_channel;
pwm_status = pwm_status | mask;
return 0;
default:
return -1;
}
}
char setPeriodNPrescale(unsigned long value_ns){
unsigned long ans;
unsigned long long numerator = (unsigned long long)value_ns*SYSTEM_FREQ_MHZ;
int index= -1;
unsigned long denominator;
//-------------------------------------------------
do{
denominator = (unsigned long)1000*pwm_prescale[++index];
ans = (unsigned long)(((long double)numerator/denominator) + 0.5) - 1; //round to nearest int
} while(ans > 0x0000FFFF && index < 3);
//-------------------------------------------------
if(ans > 0x0000FFFF)
return -1;
//-------------------------------------------------
T2CONbits.TON = 0; // Turn off the timer
T2CONbits.TCKPS = index; // Change prescale factor
PR2 = (unsigned int) ans; // Set to Maximum
T2CONbits.TON = 1; // Turn on the timer
//-------------------------------------------------
return 0;
}
write()
- User can change the duty cycle using the following functions
int pwm_write(unsigned long* buf){
if((pwm_status & (0x01 << pwm_channel)) == 0){
return -1; //Channel has not been enabled
}
switch(pwm_channel){
case 0:
OC1RS = calcDCycle(buf[0]); OC1R = OC1RS;
OC1CONbits.OCM = 6; //Simple PWM, Fault pin disabled
break;
case 1:
OC2RS = calcDCycle(buf[0]); OC2R = OC2RS;
OC2CONbits.OCM = 6; //Simple PWM, Fault pin disabled
break;
...
case 7:
OC8RS = calcDCycle(buf[0]); OC8R = OC8RS;
OC8CONbits.OCM = 6; //Simple PWM, Fault pin disabled
break;
default:
return -1;
}
return 4;
}
unsigned int calcDCycle(unsigned long value_ns){
unsigned long long numerator = (unsigned long long)value_ns*SYSTEM_FREQ_MHZ;
unsigned int index = T2CONbits.TCKPS;
unsigned long denominator = (unsigned long)1000*pwm_prescale[index];
return (unsigned int)(((long double)numerator/denominator) + 0.5) - 1; //round to nearest int
}
Propagration Delay
- PWM channels sharing the same timer will have their PWM signals synchronised (i.e. the HIGH state of the duty cycle are all triggered together).
- To introduced delay to the PWM signals, the signal from selected channels may be made to pass through a series of inverters (e.g. 74HC14D). This adds propagation delay to the signal.
- However, as propagration delay of logic gates depends on applied voltage, temperature and load capacitance, the accuracy is low and performance is poor. For accurate delay, delay lines may be used, but they are expensive.
| 3.3V | 5.0V | |||||
|---|---|---|---|---|---|---|
| Number of Gates | A | B | C | A | B | C |
| 2 | 21ns (10.5) | 23ns (11.5) | 22ns (11.0) | 15ns (7.5) | 14ns (7.0) | 14ns (7.0) |
| 4 | 45ns (11.3) | 46ns (11.5) | 46ns (11.5) | 30ns (7.5) | 30ns (7.5) | 30ns (7.5) |
| 6 | 69ns (11.5) | 70ns (11.7) | 72ns (12.0) | 45ns (7.5) | 46ns (7.7) | 47ns (7.8) |
[1] Data in specification for 4.5V: Typical 15ns, Maximum 25ns
[2] Data in specification for 6.0V: Typical 12ns, Maximum 21ns
DSP Library
- Library functions in <dsp.h> include the following categories:
- Vector
- Window
- Matrix
- Filtering
- Transform
- Control
Data Types
- Signed Fractional Value (1.15 data format)
- Inputs and outputs of the dsp functions adopt 1.15 data format, which consumes 16 bits to represent values between -1 to 1-2-15 inclusive.
- Bit<15> is a signed bit, positive = 0, negative = 1.
- Bit<14:0> are the exponent bits e.
- Positive value = 1 - 2-15*(32768 - e)
- Negative value = 0 - 2-15*(32768 - e)
- 40-bit Accumulator operations (9.31 data format)
- The dsp functions use the 40 bits accumalators during arithmatic calculations.
- Bit<39:31> are signed bits, positive = 0x000, negative = 0x1FF.
- Bit<30:0> are exponent bits.
- IEEE Floating Point Values
- Fractional values can be converted to Floating point values using: fo = Fract2Float(fr); for fr = [-1, 1-2-15]
- Floating point values can be converted to Fractional values using: fr = Float2Fract(fo); or fr = Q15(fo); for fo = [-1, 1-2-15]
- Float2Fract() is same as Q15(), except having saturation control. When +ve >= 1, answer = 215-1 = 32767 (0x7FFF). When -ve < -1, answer = -215 = -32767 (0x8000)
Build-in Library
- Some assembler operators can only be accessed by inline assembly code, for example,
- Manuipulation of accumulators A and B (add, sub, mul, divide, shift, clear, square)
- Bit toggling
- Access to psv (program space visiblity) page and offset
- Access to table instruction page and offset
- Built-in functions are written as C-like function calls to utilize these assembler operators.
Bootloader Development
Concepts
- Programming with ICSP is useful when the target board is produced in batch. The producer can download a program even when the chip is on the target board.
- However, ICSP requires an external programmer.
- To allow the user to change the program after production but without the need of an external programmer, bootloader becomes useful.
- Bootloader is a small program installed via ICSP. Everytime the device is reset, the bootloader is run first. The bootloader first detects the default serial channel whether the user wishes to download a new program to the device. If so, the bootloader will pause there, and wait for the user to download the hex file from the PC. The hex file is written to the device via RTSP instructions in the bootloader. If a new download is not necessary, the bootloader redirects to the previously installed user's program.
- The disadvantage of bootloaders is that they consume some of the memory of the device.
| Developer | Source | Platform | User Guide | Remarks |
|---|---|---|---|---|
| ingenia | Assembly | Windows |
| |
| Tiny | Assembly | Windows | Web |
|
| Elektronika | Hex | Windows | txt |
|
dsPicBootloader
- The bootloader developed by ingenia is open source and it has been modified (see below) to suit our development using dsPic30f5011.
- The bootloader (hereafter called dsPicBootloader) employs the following settings:
- Use U2ART channel
- Use FRC, PLL16
- For 5011, the bootloader is located between 0x00AE00 to 0x00AFFE (512bytes). Refer to C:\Program Files\Ingenia\ingeniadsPICbootloader\ibl_dspiclist.xml after installing the GUI interface.
- Changes made to assembly code includes:
1. including p30f5011.gld and p30f5011.inc
.include "p30f5011.inc"
2. changing the config code of UART #0x8420 -> #0x8020
; Uart init
mov #0x8020, W0 ; W0 = 0x8020 -> 1000 0000 0010 0000b
mov W0, U2MODE ; Enable UART, AutoBaud and 8N1
clr U2STA
3. changing the start address 0xAE00 - 0x0100 = 0AD00
.equ CRC, W4
.equ ACK, 0x55
.equ NACK, 0xFF
.equ USER_ADDRESS, 0x0100
.equ START_ADDRESS, 0xAD00 ; Relative to 0x0100
4. using Internal FRC and PLL16
config __FOSC, CSW_FSCM_OFF & FRC_PLL16 ;Turn off clock switching and
;fail-safe clock monitoring and
;use the Internal Clock as the
;system clock
5. disabling MCLR (optional)
config __FBORPOR, PBOR_ON & BORV_27 & PWRT_16 & MCLR_DIS
;Set Brown-out Reset voltage and
;and set Power-up Timer to 16msecs
6. changing all the related registers of U1ART to U2ART, all U1XXX => U2XXX
U2MODE, U2STA, U2BRG, U2RXREG, U2TXREG
7. changing all the related registers of IC1 to IC2, all IC1XXX => IC2XXX
IC2CON, #IC2IF, #IC2IE
dsPicProgrammer (Java-based Multi-Platformed)
- Ingenia developed a programmer (PC-side) that works only in Windows environment. The project for Linux environment is currently suspended.
- A simple programmer (hereafter called dsPicProgrammer) written in Java based on the library developed by RXTX has been developed here. The programmer supports both Linux and Windows environments, and may be used as a substitution for the official programmer developed by ingenia.
- The programmer has the following specification and limitations:
- Can be used on both Linux and Windows platforms.
- Adjustable baudrate (9600bps to 57600bps[1]).
- Support programming of dsPIC30F5011 and dsPIC33FJ128GP306[2] devices (Developers may add your devices).
- Protection against overwriting bootloader codes on devices.
- Detection if application program does not have its reset() at user's code start address.
- Reprogramming can be done without powering down the target board, provided the user's program is compliant to that stated below.
- Target board will run the user's program after programming is done.
- Can be used with USB-Serial Cables. Below is a list of tested cable:
NOTE:
[1] from version 1.5.2 onwards, the baudrate is increased to 115200bps.
[2] only dsPIC30 devices are compatible with the ingenia's programmer. For dsPIC33 devices, the protocol has been modified due to the increased flash size, and the dsPIC33 bootloader can only work with dsPicProgrammer.
Special Consideration
- The bootloader assumes that the user program starts at address 0x100. This is usually the case, but there are always exceptions.
- To ensure that the user program always starts at address 0x100, you can create a customized linker script and customized reset() function as follows:
- Copy and modify the file named "crt0.s" from the directory "C:\Program Files\Microchip\MPLAB C30\src\pic30" to the project directory and include it.
.section .reset, code //previously .section .libc, code
- Copy and modify the linkerscript for the device (e.g. p30f5011.gld) to the project directory and include it.
.text __CODE_BASE :
{
*(.reset); //<-insert this line here
*(.handle);
*(.libc) *(.libm) *(.libdsp); /* keep together in this order */
*(.lib*);
*(.text);
} >program
Communication Protocol
+-------------------+ +-------------------+----------------+
| dsPicProgrammer | | dsPicBootloader | User's Program |
+-------------------+ +-------------------+----------------+
| PC | | Target dsPic |
+-------------------+ +------------------------------------+
| COM PORT |=============| UART |
+-------------------+ +------------------------------------+
- Stage 1: User's Configuation
- Select a COM port channel
- Select a baudrate
- Select the user hex file
java -jar dsPicProgrammer.jar COM1 19200 foo.hex
- Stage 2: Resetting Target Device
- dsPicProgrammer sends a Break character (pull UART-TX to low logic, which is normally high).
- User's program on dsPic detects the break character and reset the chip
- NOTE: The user's program is expected to have the following code in order to enable this function. Otherwise, the target board must be restarted manually.
void _ISR _U2RXInterrupt(void)
{
//No Framming error
if( U2STAbits.FERR == 0)
{
//Normal procedure
}
//Framming error
else
{
if ( U2STAbits.URXDA ){
unsigned char data;
data = (unsigned char) U2RXREG;
if(data == 0x00){
// A break char has been received:
// U2RX has been pulled to zero for more than 13 bits
// This is used to reboot the pic
mdelay(800); //wait for break character to clear
asm("reset"); //software reset
}
}
}
_U2RXIF = 0; //Clear the flag
}
- Stage 3: Entering Ingenia's Protocol
- Transmission is conducted in 8N1, i.e. 8-bit, no parity, 1 stop-bit
- Communication Protocol is reviewed in ingenia bootloader user's guide section 2.1.3. The following summarises the key steps on the PC side (Refer also to section 2.2.2).
- Autobaud rate detection: dsPicProgrammer continuously sends a character "U" [0x55] via COM port and waits for an acknowledgment character "U", [ACK] = [0x55]
- Version Control: dsPicProgrammer sends the command character [0x03]. On success, dsPicProgrammer receives 3 characters i) Major Version ii) Minor Version iii) Acknowledgment [0x55]
- Device ID Monitoring: dsPicProgrammer sends the read command character [0x01] + 24-bit address [High][Medium][Low] (0xFF0000). Then, it receives 4-byte data [High][Medium][Low][ACK]
- Load the user hex file and check integrity
- Start Programming: dsPicProgrammer issues the write command character [0x02] + 24-bit address [High][Medium][Low]+ Number of bytes [N] + [data 0] + [data 1] + ... + [data N-1] + [CRC]=(INTEL HEX8 Checksum - Sum modulo 256) and receives [ACK] or [NACK] = [0xFF]
- NOTE: Writing is in row mode access (i.e. erase and write a whole row, each row has 32 instructions, or 96 bytes because each instruction has 24 bits)
- Stage 4: Goto User's Program
- dsPicProgrammer sends the goto user code command [0x0F]
USB-RS232 Bridge
- As USB ports are becoming more and more common, COM ports and Parallel ports may be redundant in the next few years. This section explore the possibilities of programming the target board through a USB port.
- There are two options:
- Use an external USB/RS232 adaptor, the driver will emulate a virtual COM port, such as Prolific and FDTI. Ingenia has tested its bootloader with some USB-232 manufacturers (silabs, FTDI, etc..). However, the programming failed with our Prolific adapter. Application program may use JavaComm API (javax.comm) and/or RXTX to drive the COM port.
- Modified the bootloader program on PC to support USB communication. e.g. using jUSB and JSR-80 (javax.usb). External circuits such as PIC18F4550 and MAX232 are required.
|--User's App.--|-------Device Manager------|-------USB-RS232 Interface------|---dsPIC---|
Option 1:
+-------------+ +----------+ +----------+ +---+ +------------+ +-----+ +--------+
| Application |--| JavaComm |--| Virtual |==|USB|--| FDTI |--|RS232|==| Target |
| Program | | RXTX | | COM Port | +---+ | Circuitary | +-----+ | Board |
+-------------+ +----------+ +----------+ +------------+ +--------+
Option 2:
+-------------+ +--------+ +---+ +------------+ +-----+ +--------+
| Application |----------| JSR-80 |==========|USB|--| PIC18F4550 |--|RS232|==| Target |
| Program | | jUSB | +---+ | MAX232 | +-----+ | Board |
+-------------+ +--------+ +------------+ +--------+
- Currently, when RXTX is incorporated with JavaComm API, operating systems supported include Linux, Windows, Mac OS, Solaris and other operating systems. On the other hand, jUSB and JSR-80 only works for linux.
FDTI Chipset
- FT232RL communicates with PC via USB to provide 1 UART channel.
- Datasheet can be downloaded here.
- Refer to Fig. 11 (Page 19) for Bus Powered Configuration.
- Refer to Fig. 16 (Page 24) for for UART TTL-level Receive [RXD -> 1], Transmit [TXD -> 4], Transmit Enable [CBUS2/TXDEN -> 3]. Omit Receive Enable [CBUS3/PWREN#] and use [CBUS2/TXDEN -> 2]
- Refer to Fig. 15 (Page 23) for LED Configuration: [CBUS0/TXLED#] and [CBUS1/RXLED#]
- Virtual COM Port Drivers can be downloaded here.
Programming the Device
Requirements
- Hardware
- PC with COM port (Windows XP Installed for MPLAB)
- ICD2 Programmer
- Target Board
- 5V Power Supply
- Software
- MPLAB IDE v7.50: v7.60 is not compatible with our current ICD2 Programmers. There are consistent "Devices cannot be founded" warnings.
- dsPicProgrammer (dsPicProgrammer.jar)
- RXTX driver: download and upzip rxtx-2.1-7-bins-r2.zip (Final)
- Files
- dsPicBootloader (bl_5011.hex). Original assembly code by ingenia can be downloaded from here.
- Application hex file (e.g. app.hex)
Loading Bootloader (Once only)
| Step | Remarks |
|---|---|
| Install MPLAB IDE |
|
| Install USB Driver |
|
| Select Target Chip |
|
| Target <-> ICD 2 |
|
| ICD 2 <-> PC |
|
| Load Bootloader |
|
| Start Programming |
|
| Finishing |
|
Loading Firmware
Java Environment Setup
- Download and install the latest JDK or JRE
- Available from Sun Microsystems (e.g. JDK 6 Update 3)

- Available from Sun Microsystems (e.g. JDK 6 Update 3)
- Download and Extract RXTX Driver
- Available from RXTX
- File: rxtx-2.1-7-bins-r2.zip (Final)
- Extract the files using software such as WinRAR

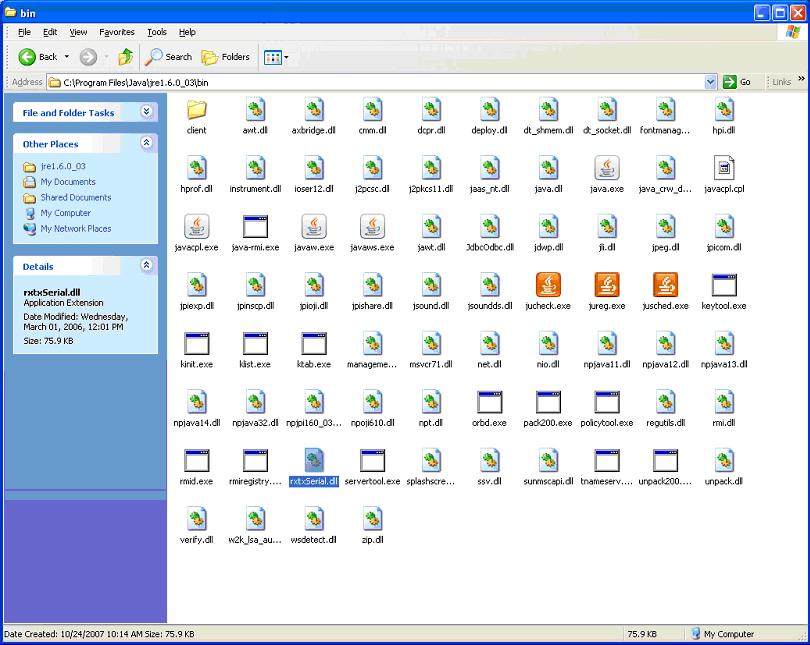
- Copy RXTXcomm.jar
- To C:\Program Files\Java\X\lib\ext (under the latest jre, e.g. X = jre1.6.0_03)

- To C:\Program Files\Java\X\lib\ext (under the latest jre, e.g. X = jre1.6.0_03)
- Copy rxtxSerial.dll
- To C:\Program Files\Java\X\bin (under the lastest jre, e.g. X = jre1.6.0_03)
- For Linux users, copy librxtxSerial.so to /jre/lib/[machine type] (i386 for instance)
- Download dsPicProgrammer
- Available from here
- Expand the latest tag under dsPicProgrammer
- File: dsPicProgrammer.jar

- Save the file (dsPicProgrammer.jar) and your hex file (foo.hex) to your local directory (e.g. C:\dsPicProgrammer\)
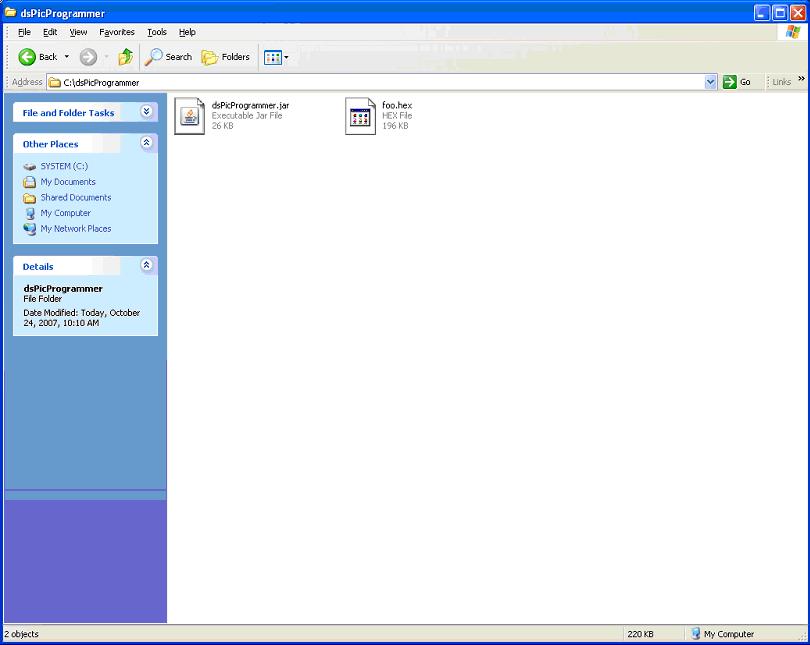






directly download this package
Download Firmware
- Start a Command Prompt
- Start -> Run
File:2 1 run.JPG - Enter cmd
File:2 2 cmd.JPG
- Start -> Run
- Run dsPicProgrammer
- Make sure your device is connected through a "Direct RS232 Cable" to PC Serial Port.
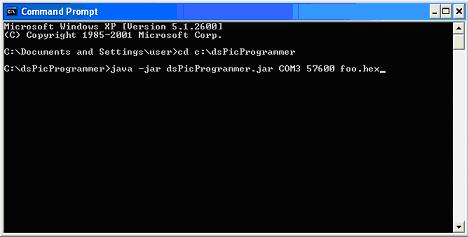
- Change to the directory where dsPicProgrammer.jar is located and run the command:
- [path/to/java/]java -Djava.library.path=[path/to/rxtxlib] -jar dsPicProgrammer.jar COM1 57600 foo.hex
- for example, jre\bin\java -Djava.library.path=.\rxtx\bin -jar dspicProgrammer.jar COM1 57600 foo.hex
- Or directly using dsPicProgrammer.bat COM1 57600 foo.hex(Windows)
- java -jar dsPicProgrammer.jar /dev/ttyS0 57600 foo.hex (Linux)
- [path/to/java/]java -Djava.library.path=[path/to/rxtxlib] -jar dsPicProgrammer.jar COM1 57600 foo.hex
- where COM1 is your COM Port ID
- 57600 is communication speed [in bps]
- foo.hex is your firmware new file

- When the program prompt you for an input, press y:
File:2 4 prompt.JPG - If communication can be established, you should see something like this:

- Wait until programming is completed.
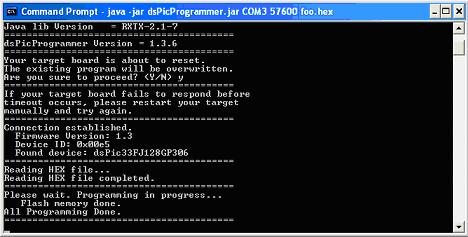
- after all completed, power OFF your device, then power ON again, enjoy your new updated.
- When the program prompt you for an input, press y:


Troubleshooting
- Invalid COM Port
- In case of selecting an invalid COM port, you should see the error message:
gnu.io.NoSuchPortException: Choosing COM Port Error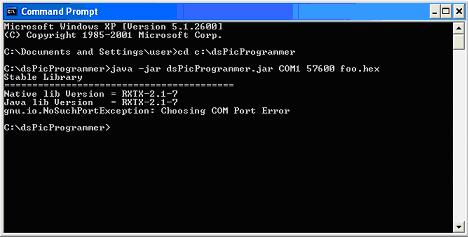
- In case of selecting an invalid COM port, you should see the error message:
- Missing firmware file
- In case of selecting a firmware file that does not exist, you should see the error message:
java.io.FileNotFoundException: foo1.hex <The system cannot find the file specified>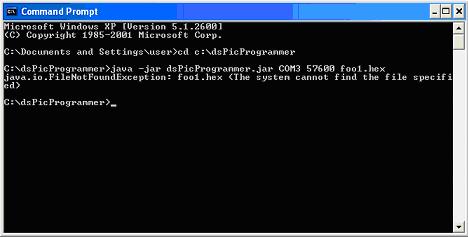
- In case of selecting a firmware file that does not exist, you should see the error message:
- Missing RXTX driver
- In case of missing the RXTX driver, you should see the error message:
Exception in thread “main” java.lang.NoClassDefFoundError: gnu/io/UnsupportedCommOperationException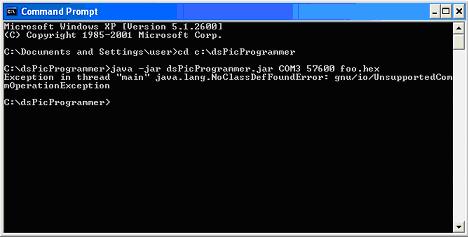
- In case of missing the RXTX driver, you should see the error message:



{kind=link}
{kind=link}
{kind=link}
Remote Access
- At the moment, local devices (e.g. EEPROM, ADC, DAC, etc.) can only be accessed locally through POSIX functions such as open(), read(), write(), ioctl().
- However, a client may need to access these devices on a remote server. This section reviews the background and gives some ideas on its possible implementation.
Requirements
- A remote file access protocol, to transfer "files" (i.e. device's data) such as:
- File Transfer Protocol (FTP): Required files are copied from sever to client for manipulation
- Remote Shell (RSH): Required files are copied from sever to client for manipulation
- Network File System (NFS): Required files are manipulated on sever
- An API to access files using a selected protocol, such as:
- lam_rfposix: A POSIX-like remote file service for Local Area Multicomputer
- API employed by VxWorks: VxWorks is a Unix-like real-time operating system, commonly used for embedded systems.
API Reference for VxWorks
- Reference:
- Related Libraies
- netDrv (netDrv.h): an API using FTP or RSH
- nfsDrv (nfsDrv.h): an API using NFS
Conversion to dsPIC33F Devices
- This section discusses the conversion required from dsPIC30F5011 to dsPIC33FJ128GP306.
- Refer to official document dsPIC30F to dsPIC33F Conversion Guidelines (DS70172A).
- Note that this section does not mainly intend to introduce the new functionalities of dsPIC33F devices. It only serves the purpose to summarise the major (if not minimum) changes required to port the setup of dsPIC30 to dsPIC33 devices.
Hardware
- dsPIC33 operates at voltage of 3.3V. A voltage regulator, such as LM3940 can be used to convert 5V supply to 3.3V.
- A 1uF capacitor has to be placed at pin 56 (previously VSS, now VDDCORE).
Software
Configuration Bits
- dsPIC33 can operate at 40MIPs at maximum. To configure the device using internal FRC, replace the configuration bits setting as follows:
_FOSCSEL(FNOSC_FRCPLL); // FRC Oscillator with PLL
_FOSC(FCKSM_CSDCMD & OSCIOFNC_ON & POSCMD_NONE);
// Clock Switching and Fail Safe Clock Monitor is disabled
// OSC2 Pin Function: OSC2(RC15) as Digital IO
// Primary Oscillator Mode: Disabled
_FWDT(FWDTEN_OFF); // Watchdog Timer Enabled/disabled by user software
- Configure on-chip PLL at runtime as follows (at start of main function):
_PLLDIV = 38; // M=40: PLL Feedback Divisor bits
CLKDIV = 0; // N1=2: PLL VCO Output Divider Select bits
// N2=2: PLL Phase Detector Input Divider bits
OSCTUN = 22; // Tune FRC oscillator, if FRC is used;
// 0: Center frequency (7.37 MHz nominal)
// 22: +8.25% (7.98 MHz)
RCONbits.SWDTEN = 0; // Disable Watch Dog Timer
while(OSCCONbits.LOCK != 1); // Wait for PLL to lock
UART
- No change is required.
I2C
- dsPIC33 supports upto 2 I2C devices. As a result, replace all I2C related registers with xxI2Cyy to xxI2C1yy. For examples:
_SI2C1IF = 0; //Clear Slave interrupt _MI2C1IF = 0; //Clear Master interrupt _SI2C1IE = 0; //Disable Slave interrupt _MI2C1IE = 0; //Disable Master interrupt I2C1BRG = I2C_BRG; // Configure Baud rate I2C1CONbits.I2CEN = 1; ... etc.
ADC
- The ADC in dsPic33 is significantly different from that in dsPic30. Specifically, ADC in dsPic33 uses DMA to buffer the adc data. Replace the open, interrupt routine, add and remove codes as follows:
unsigned int adc_bufA[ADC_MAX_CH] __attribute__((space(dma),aligned(256))); unsigned int adc_bufB[ADC_MAX_CH] __attribute__((space(dma),aligned(256))); unsigned int* ADC16Ptr; //Pointer to ADC register buffer, unsigned char adc_ch_select = 0; //Pointer to channel to be read from unsigned char adc_data_ready = 0; //Indicate if RAM data is ready for output unsigned int which_dma = 0; //indicate which adc_buf to be used
void adc_open(void)
{
// Configure interrupt
_AD1IF = 0; //clear ADC interrupt flag
_AD1IE = 0; //disable adc interrupt
AD1CHSbits.CH0NA = 0;
// Configure analog i/o
_TRISB0 = 1;
_TRISB1 = 1;
AD1PCFG = 0xFFFC; //Enable AN0 (Vref+) and AN1 (Vref-)
AD1PCFGH = 0xFFFF; //AN16-AN31: Disabled
// Configure scan input channels
AD1CSSL = 0x0003; //0 => Skip, 1 => Scan
AD1CSSH = 0x0000; //Skipping AN16-AN31
// ADCCON4:
AD1CON4bits.DMABL = 0; // Each buffer contains 1 word
// ADCCON3:
AD1CON3bits.SAMC = 1; //1TAD for sampling time
AD1CON3bits.ADRC = 0; //Use system clock
AD1CON3bits.ADCS = ADC_ADCS; //each conversion requires 14TAD
// ADCCON2:
AD1CON2bits.VCFG = 3; //External Vref+, Vref-
AD1CON2bits.CSCNA = 1; //Scan input
AD1CON2bits.SMPI = 1; //2 channels are scanned
// ADCCON1:
AD1CON1bits.FORM = 0; //[0:integer]; [2 fractional]; [3 siged fractional]
AD1CON1bits.SSRC = 7; //auto covert, using internal clock source
AD1CON1bits.ASAM = 1; //auto setting of SAMP bit
AD1CON1bits.AD12B = 1; //12-bit, 1-channel ADC operation
AD1CON1bits.ADDMABM = 0; // DMA buffers are built in scatter/gather mode
AD1CON1bits.ADON = 1; // Turn on the A/D converter
// DMA0 Configuration:
DMA0CONbits.AMODE = 2; // Configure DMA for Peripheral indirect mode
DMA0CONbits.MODE = 2; // Configure DMA for Continuous Ping-Pong mode
DMA0PAD=(int)&ADC1BUF0;
DMA0CNT = 1; // generate dma interrupt every 2 samples
// same as SMPI because only 1 dma buffer per channel
DMA0REQ = 13; // Select ADC1 as DMA Request source
DMA0STA = __builtin_dmaoffset(adc_bufA);
DMA0STB = __builtin_dmaoffset(adc_bufB);
_DMA0IF = 0; // Clear the DMA interrupt flag bit
_DMA0IE = 1; // Set the DMA interrupt enable bit
DMA0CONbits.CHEN=1; // Enable DMA
}
void _ISR _DMA0Interrupt(void)
{
ADC16Ptr = (which_dma == 0)? adc_bufA : adc_bufB; //Update pointer
adc_data_ready = 1;
which_dma ^= 1; //Next buffer to be used
_DMA0IF = 0; //Clear the DMA0 Interrupt Flag
}
static void adcAdd(unsigned char ch){
unsigned int mask;
mask = 0x0001 << ch;
TRISB = TRISB | mask;
AD1CSSL = AD1CSSL | mask;
AD1PCFG = ~AD1CSSL;
AD1CON2bits.SMPI++; //take one more sample per interrupt
DMA0CNT++;
}
static void adcRm(unsigned char ch){
unsigned int mask;
mask = 0x0001 << ch;
AD1PCFG = AD1PCFG | mask;
AD1CSSL = ~AD1PCFG;
AD1CON2bits.SMPI--; //take one less sample per interrupt
DMA0CNT--;
}
EEPROM
- There is no EEPROM in dsPIC33 devices. Please consider to use an external EEPROM using I2C communication.
Simple PWM
- No change is required.
Memory Map for dsPIC33FJ128GP306
| Type | Start Address | End Address | Size |
|---|---|---|---|
| Flash | 0x000000 | 0x0157FF | 86K[1] |
| +--Flash: Reset Vector | 0x000000 | 0x000003 | 4 |
| +--Flash: Interrupt Vector Table | 0x000004 | 0x0000FF | 252 |
| +--Flash: Alternate Vector Table | 0x000104 | 0x0001FF | 252 |
| +--Flash: User Program | 0x000200 | 0x0157FF | 85.5K |
| Programming Executive | 0x800000 | 0x800FFF | 4K[1] |
| Config Registers | 0xF80000 | 0xF80017 | 24 |
| Device ID (0xE5) | 0xFF0000 | 0xFF0003 | 4 |
[1] Each address is 16-bit wide. Every two addresses correspond to a 24-bit instruction. Each even address contains 2 valid bytes; each odd address contains 1 valid byte plus 1 phathom byte.
Custom Linker Script to Maximize Space for Constant Data
- Constant data declared using keyword const will be stored in the .const section in the flash memory.
- Normally, during compilation, the linker will assign these data after the program code (.text section).
- Since .const is accessed by auto-psv function, to maximize the space for constant data (32kb), the .const section needs to be aligned at 0x80000 boundary.
- This requires the following change in linker script:
__CONST_BASE = 0x8000;
.text __CODE_BASE :
{
*(.reset);
*(.handle);
*(.libc) *(.libm) *(.libdsp); /* keep together in this order */
*(.lib*);
/* *(.text); deleted to maximize space for const data */
} >program
.const __CONST_BASE :
{
*(.const);
} >program
- If your program is large, after this change in linker script, function calls may involve large jump in the memory map (>32kB). As a result, you may need to enable the large code and large memory model during compilation. In such case, use the following options in your build path:
-mlarge-code -mlarge-data
- Meanwhile, functions that are defined in the standard C libraries, but are replaced with your own implementations (e.g. I/O stubs: open(), read(), write(), lseek(), ioctl() etc.) may have the following linker error:
/usr/pic30-elf/lib//libc-elf.a(fflush.eo)(.libc+0x3c): In function '.LM11': : Link Error: relocation truncated to fit: PC RELATIVE BRANCH _write /usr/pic30-elf/lib//libc-elf.a(fclose.eo)(.libc+0x42): In function '.LM18': : Link Error: relocation truncated to fit: PC RELATIVE BRANCH _close
- To resolve the problem, you need to place the functions in the .libc section rather than in the .text section, like this:
#define LIBC_CODE_LOC __attribute__ ( (section(".libc")))
int LIBC_CODE_LOC open(const char *pathname, int flags){ ... }
int LIBC_CODE_LOC close(int fd){ ... }
int LIBC_CODE_LOC write(int fd, void* buf, int count) { ... }
int LIBC_CODE_LOC read(int fd, void* buf, int count) { ... }
int LIBC_CODE_LOC ioctl(int fd, int request, void* argp) { ... }
int LIBC_CODE_LOC lseek(int fd, int offset, int whence) { ... }
dsPicBootloader and dsPicProgrammer
- RTSP for dsPIC33F is different from dsPIC30F.
- Row size changes from 32 instructions (96bytes) to 64 instructions (192 bytes)
- Erase operation changes from 1 row to 8 rows
- No EEPROM
- With regards to the above changes, dsPicBootloader and dsPicProgrammer has been modified. In particular, dsPicProgrammer can be used to program both dsPic30F and dsPic33F devices (Yet, dsPic33F is no longer compatible with Ingenia's programmer). You can easily add your devices to the source code.
Downloads
| Program | Site 1 | Site 2 | Remarks |
|---|---|---|---|
| JDK | website | Download latest JDK | |
| RXTX | website | Download rxtx-2.1-7-bins-r2.zip or later | |
| dsPicBootloader | click | click (v1.3) | Under "dsPicBootloader/", download bl_5011.s or bl_j128gp306.s |
| dsPicProgrammer | click | click (v1.3.5) | Under "dsPicProgrammer/", dowload dsPicProgrammer.jar Alternatively, if you want to compile yourself or modify the source code, download all source files under "dsPicProgrammer/" plus RdFileIntelHex.java under "IntelHexPaser/tags/0.02.00/". You should also install RXTX on your local machine as recommended in the readme file. |
| Ingenia's bootloader | website | Download original ingenia's bootloader |
ToDo
- program the bootloader into flash under linux platform